SKIMA-15型 智能制造實訓系統-醫藥化工
所屬類別:智能制造系列
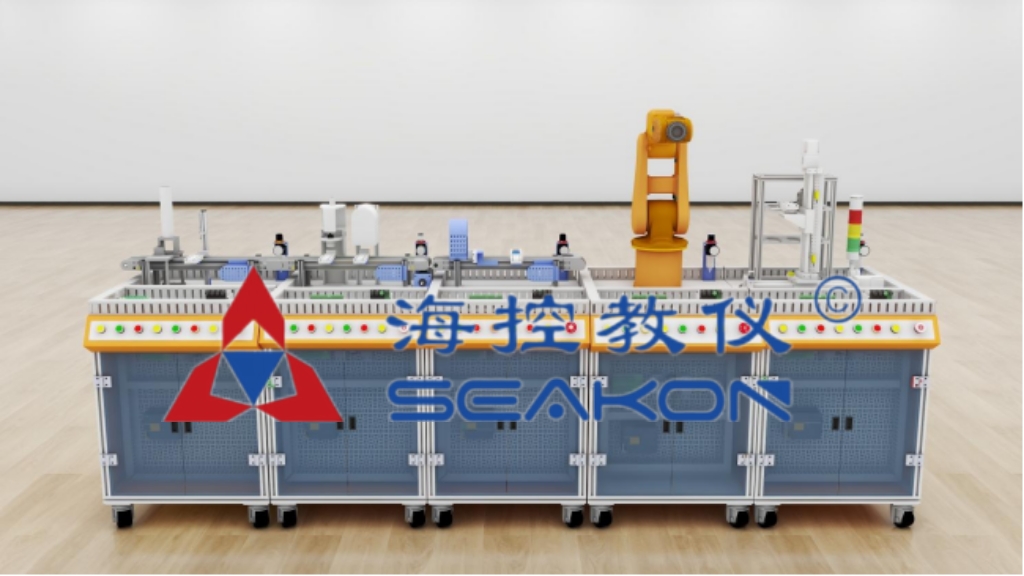
·設備外觀
·設計簡述
實訓系統主要由上料站、加蓋擰蓋站、檢測分揀站、六軸機器人搬運站、立體倉庫站等組成。本系統主要由“工作站”形式綜合體現,“工作站”以模塊方式自由組合,形成多種模式,操作者不但在實習、工作中培養、訓練了機械裝調、電氣管路連接、程序設計、工業機器人應用、傳感器應用、計算機應用、檢修排故、觸摸屏組態、伺服、步進驅動控制等機電專業技能,同時也可以體驗到職業素養中的社會能力與方法能力。·主要參數
1、工作電源:單相三線AC220V±10% 50Hz2、工作環境:溫度-10℃~+40℃ 相對濕度<85%(25℃) 海拔<4000m
3、裝置容量:≤3.0KVA;
4、整機尺寸:3000mm×800mm×1500mm ;單站:約600mm×860mm×1400mm;
5、安全保護:具有漏電保護、過載保護、安全性符合國家標準。
·組成及功能
每個獨立的站由實訓桌、執行機構及掛板構成。每套設備除配獨立的站外,還配電腦桌等。實訓桌:實訓桌主體由型材框架、型材桌面板、封板、操作面板、自吸合門、多功能網孔板和萬向輪等組裝而成。
其中框架采用3030型工業型材組成搭接而成,外側配有橙色襯條裝飾;型材桌面板采用工業標準2080鋁型材并通過1.5mm冷軋鋼板組裝而成,內置專用螺母,可自由固定各種機械機構,固定方式≥200種,可以完成更多的實訓操作;封板采用≥1.2mm冷軋鋼板制作,橘紅色噴塑處理;
桌前設有控制面板,按鈕面板采用≥1.2mm冷軋鋼板橘色噴塑處理,且呈50°斜角,符合人體工程學,方便操作;面板安裝有啟動、停止、復位、急停按鈕,用于進行工作站各項控制功能。
實訓桌正面下方設有自吸合活動門,采用鋁合金高強度合頁固定,配有深棕色有機玻璃觀察窗,設備維護方便。
實訓桌內部設有多功能網孔板機構,網孔采用5mm橢圓長孔,整體設計規范、合理,電氣元器件在任何角度、任何方位都能輕松裝配、調整。
實訓桌底部安裝有4個高強度帶剎車萬向輪方便實訓裝置的移動和固定。
執行機構:采用鋁板精加工后組裝而成,表面噴砂后陽極氧化,既防腐蝕又美觀大方。
掛板:采用1.5mm冷軋鋼板焊接而成,網孔板采用5mm橢圓長孔加工,整體設計規范、合理,電氣元器件在任何角度、任何方位都能輕松裝配、調整。斜裝于實訓桌正下方,可很方便地取、卸。掛板上裝有PLC、變頻器等電器元件,統一由電纜線及快速插頭與實訓桌上的執行機構連接。
電腦桌:
主體部分采用工業標準鋁型材(規格30×30)組裝而成,封板采用1.5mm冷軋鋼板噴塑處理;
桌面上方設置有顯示器圍欄,采用1.5mm冷軋鋼板沖φ6.5mm工藝孔,既美觀又實用,防止顯示器墜落;
鍵盤鐵質材料加工噴塑而成,通過加重型軸承導軌吊裝在桌面板下方,抽出縮回自如;
桌體配有4個帶剎車萬向輪,方便電腦桌移動和固定。
尺寸:600*500*1000mm(桌面離地800mm)
·實訓項目
(一)PLC基礎任務實訓1、PLC定時器元件應用;
2、PLC計數器元件應用;
3、PLC高速脈沖輸入及相關特殊功能元件應用;
4、PLC 以太網網絡通訊令及相關特殊功能元件應用。
(二)機械裝調基礎實訓
1、機械圖樣識讀;
2、裝配前、后零件及設備的檢測;
3、裝配的劃線、找正;
4、軸瓦等配合面的銼削、刮削;
5、典型零、部件的裝配與調試;
6、氣動元件的裝配、調試與管路連接;
7、電機、軸承、擋圈、連軸器、同步輪、同步帶、平帶、傳感器的裝配與調試;
8、軸承、蝸輪、蝸桿、滾珠絲杠的潤滑。
(三)觸摸屏
1、觸摸屏的工程創建、編輯與下載操作;
2、觸摸屏的離線模擬應用;
3、觸摸屏的在線模擬應用;
4、觸摸屏的輸入輸出位元件應用;
5、觸摸屏的輸入輸出字元件應用;
6、觸摸屏的XY曲線圖形元件應用;
7、觸摸屏的動畫元件應用;
8、觸摸屏的數值、文本輸入顯示元件應用;
9、觸摸屏的報警信息、事件登錄等元件的應用;
10、觸摸屏的定時器等元件的應用;
11、觸摸屏的系統綜合應用。
(四)上料單元
1、光電傳感器的接線與調試;
2、直流電機的接線與調試;
3、雙聯氣缸的安裝和氣量調節與磁性開關的接線和位置調整;
4、基于皮帶輸送機構的機械安裝與調試;
5、基于灌裝機構的機械安裝與調試;
6、基于上料灌裝單元控制掛板的電氣安裝與調試;
7、基于上料灌裝單元模型綜合安裝、接線與調試;
8、基于PLC的皮帶上料機構運行控制;
9、基于PLC的灌裝機構運行控制;
10、基于PLC的上料灌裝單元綜合運行控制。
(五)加蓋擰蓋單元
1、光電傳感器的接線與調試;
2、直流電機的接線與調試;
3、筆型氣缸的安裝和氣量調節與磁性開關的接線和位置調整;
4、雙聯氣缸的安裝和氣量調節與磁性開關的接線和位置調整;
5、基于皮帶輸送機構的機械安裝與調試;
6、基于加蓋機構的機械安裝與調試;
7、基于擰蓋機構的機械安裝與調試;
8、基于加蓋擰蓋單元控制掛板的電氣安裝與調試;
9、基于加蓋擰蓋單元模型綜合安裝、接線與調試;
10、基于PLC的加蓋機構運行控制;
11、基于PLC的擰蓋機構運行控制;
12、基于PLC的加蓋擰蓋單元綜合運行控制;
(六)檢測分揀單元
1、光電傳感器的接線與調試;
2、光纖傳感器的接線與調試;
3、測水傳感器的接線與調試;
4、直流電機的接線與調試;
5、雙聯氣缸的安裝和氣量調節與磁性開關的接線和位置調整;
6、基于皮帶輸送機構的機械安裝與調試;
7、基于檢測分揀單元控制掛板的電氣安裝與調試;
8、基于檢測分揀單元模型綜合安裝、接線與調試;
9、基于PLC的檢測分揀單元綜合運行控制;
(七)6軸機器人搬運單元
1、光電傳感器的接線與調試;
2、行程開關的接線與調試;
3、步進電機的接線與調試;
4、雙聯氣缸的安裝和氣量調節與磁性開關的接線和位置調整;
5、基于步進升降機構的機械安裝與調試;
6、基于機器人夾具的機械安裝與調試;
7、6軸機器人的組成應用;
8、軸機器人的初始化應用操作;
9、6軸機器人的編程/仿真軟件應用操作;
10、6軸機器人的示教單元應用操作;
11、6軸機器人控制器應用操作;
12、6軸機器人的應用編程;
13、6軸機器人的IO通訊應用設計;
14、軸機器人的安全操作應用設計;
15、6軸機器人的綜合應用設計;
16、基于PLC的步進升降機構運行控制;
17、基于PLC的6軸機器人物料瓶子吸取放置應用控制;
18、基于PLC的6軸機器人搬運單元綜合運行控制;
(八)立體倉庫單元
1、光電傳感器的接線與調試;
2、行程開關的接線與調試;
3、氣動吸盤安裝與應用;
4、雙聯氣缸的安裝和氣量調節與磁性開關的接線和位置調整;
5、伺服驅動器的限位保護參數設置;
6、伺服驅動器的電子齒輪比參數設備;
7、伺服驅動器的位置模式運行控制;
8、伺服電機的力矩模式運行控制;
9、伺服電機的速度模式運行控制;
10、基于PLC 脈沖指令的運行控制;
11、基于PLC的水平軸定位運行控制;
12、基于PLC的垂直軸定位運行控制;
13、基于PLC立體倉庫綜合運行控制;
